| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |
| 7 | 8 | 9 | 10 | 11 | 12 | 13 |
| 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| 28 | 29 | 30 |
- Linux
- 3D프린터
- AirPods
- sierra
- 버그
- 아이폰
- tevo
- 터치바
- IOS
- 3D 프린터
- 애플
- 모하비
- BIQU
- mojave
- 시에라
- 맥
- 맥북프로
- 정식버전
- 컨트롤러
- Tarantula
- catalina
- Fedora
- macos
- asahi linux
- Mac
- iOS 13
- 에어팟
- 업데이트
- high sierra
- beta
- Today
- Total
elsa in mac
tevo tarantula 업그레이드 - part 1 (X축 브라켓) 본문

무더운 여름의 기세가 한풀 꺽이고, 가을이 다가오는 것을 느낄 수 있는 9월의 첫 주말 입니다. elsa in mac을 찾아 주시는 모든 분들도 편안한 주말이 되셨으면 합니다.
Tevo Tarantula 3D 프린터를 구매하고 사용한지도 어느덧 2달 이 넘어가고 있네요... 3D 프린터라는 것을 전혀 알지도 못하고 살아오다가 우연한 기회에 접하게 되면서 많은 것들을 새로 배우는 계기가 된 것 같아 한편으로는 즐겁습니다.
많고 많은 3D 프린터 중에 Prusa I3의 Clone인 저가 대륙발 3D 프린터인 Tevo를 선택한 가장 큰 이유는 3D 프린터의 가격이였지만, FaceBook의 사용자 Forum이 매우 활발한 이유였습니다. Tevo의 기술력을 무시하는 것은 아니지만, Tevo Tarantula는 대단히 단순하면서 부족한 부분을 많이 가지고 있는 프린터 입니다. 단순히 3D 프린터를 이용하는 사용자 측면에서 보자면, 결코 높은 평가를 할 수 없는 프린터인 셈이죠.. 하지만, 아이러니컬 하게도 이러한 많은 부족한 부분 때문에 3D 프린터를 익히고 배우는데 큰 동기가 됩니다. 좋은 퀄리티의 출력물을 뽑기 위해서는 무조건 개선을 해야 하기 때문이죠.. ^^
가성비를 따져 보면, 큰 불만은 없지만, 내 Tarantura를 좀 더 높은 품질로 끌어 올리기 위해 그 동안 많은 고민과 개선의 노력(?)을 기울였습니다. 이번 포스트에서는 몇 차례에 걸처 어떤 부분을 어떻게 개선했는지에 대해 정리를 해 보겠습니다.
1. X축의 기울임 문제
영어로는 slant라고 유저들이 표현을 하는데요.. 바로, Hot Ends를 좌/우로 이동 시키기 위한 X축 프로파일의 기울임 문제 입니다.

위의 그림에서 보면, 수평 Red Line 부분으로 Z축에 대해 90도 각도로 Tarantula 전체로 보면, 항상 수평을 유지해야 합니다. 이 부분이 수평을 이루지 못하면, Hot End가 좌에서 우로 우에서 좌로 왔다갔다 하면서 출력을 할 때, 기울어진 쪽은 Bed와 가까와 지고, Bed와 먼쪽은 멀어지기 때문에 기울어진 각도가 클 경우 올바른 출력을 할 수 가 없게 됩니다.
초기에 조립을 할때는 어느 정도 수평을 정확히 맞출 수 있지만, 프린트를 하면서 구동을 많이 하게 되면, 다시 기울어 지게 됩니다. 여기에는 몇 가지 이유가 있습니다.

첫 번째로 X축 프로파일과 좌/우 브라켓을 영결하는 T Nut 의 유격 입니다. 위의 그림에서 보면, X축 브라켓은 X 축 프로파일과 정확히 90도를 이루고 있어야 합니다. X축 프로파일이 좌/우 브라켓에 달려 있기 때문에, 좌/우 각각의 브라켓이 X축 프로파일과 90도의 각도를 이루고 있지 않다면, X축 자체가 기울어 지게 됩니다.

위의 도식에서 제일 위의 도식은 정확히 90도 각도로 수평을 이루고 있는 이상적인 상태이고, 중간과 제일 아래 도식은 브라켓과 프로파일이 90도 각도를 이루지 못해 결론적으로 기울어진 상태를 표현하고 있습니다.
3개의 T Nut를 이용하여 프로파일의 4군데를 조이므로 얼핏 생각하기에는 브라켓과 프로파일이 90도 각도를 이룰 것 같지만, 프로파일의 홀(Hole)과 T Nut간의 유격으로 인헤 정확히 90도로 조립된다는 보장을 할 수 없습니다.

위의 그림은 2040 profile의 모델로 보면 V slot이 폭이 6mm 인 것을 알 수 있습니다. taratula를 조립할 때, 사용하는 T-Nut의 볼트의 규격은 4mm 이므로 이론적으로만 봐도, 2mm의 공차가 발생하는 것을 알 수 있습니다.

만일 왼쪽 bracket을 조립할 때, T-Nut를 프로피알의 하단에 붙여서 조립하고, 오른쪽 Bracket을 프로파일의 v slot 윗쪽에 붙여서 조립을 할 경우, 좌/우 거리를 대랙 240mm 라고 할 때, 최대 4mm 공차가 발생할 수 있는데, 프린트 출력 시, layer height를 0.2mm로 설정할 경우, 20 layer에 해당되는 큰 오차 입니다.
이 문제를 근본적으로 해결하기 위해, X축 좌/우 브라켓을 아래와 같이 수정했습니다.

위의 그림은 X축 프로파일에 조립되는 좌/우 브라켓의 디자인인데요.. 프로파일이 닿는 뒷쪽을 보여 줍니다. 보시면, 프로파일의 v slot 홀(Hole)에 들어가도록 돌출 부분을 만든 것을 보실 수 있습니다. 그리고, 그 돌출 부분들 사이로 T Nut을 조일 볼트 홀이 있습니다. T-Nut의 유격을 제거하기 위해 브라켓 자체에 프로파일에 조립 시 상/하로 유격이 발생할 수 없도록 v slot의 폭에 해당하는 6,mm 폭의 가드 레일을 만든 셈 입니다. 이런 디자인을 적용하면, 프로파일과 브라켓이 완전 90도를 있음은 물론, 좌/우 브라켓 또한 높이 차 없이 일치 시킬 수 있게 됩니다.
2. X축 프로파일의 무게 중심 불 일치 문제
위와 같이 X축 브라켓의 디자인을 개선했다고 해서 X축이 한쪽으로 기울어지는 Slant 문제를 완전히 해결할 수는 없습니다. 이유는 X축 프로파일이 위/아래로 움직여주는 구동 포인트가 X축의 무게 중심 중앙에 있지 않기 때문입니다.

위의 그림은 Tarantula를 뒤에서 본 모양 입니다. 보시면, X축을 상/하로 이동시키는 구동 점은 빨간색 원 부분 즉, Z축 Rod에 물려 있는 rod nut 입니다. 이 위치가 X축의 무게 중심에 위치 하지 않는 문제가 있습니다. 그림에서 보면, 녹색 사각형 부분과 파란색 사각형 부분의 무게가 서로 다른 것이죠.. 녹색 박스 부분에 X축 구동 모터가 달려 있기는 하지만, 2040 프로파일의 무게 즉, 파란색 영역의 무게에 비하면 모터의 무게는 너무 가볍 습니다.
따라서, 좌/우에 위치한 수직 프로파일을 잡고 있는 좌/우 각각 4개의 V Wheel들의 접점이 그 나마 한쪽으로 완전 쳐지지 않도록 X축 프로파일을 잡고 있음에도 불구하고 상/하 구동 시 V-wheel에 작용하는 힘의 균형이 다릅니다.
조립 후 프린트를 사용하게 되면, 끊임 없이 구동하게 되고, 자체적으로 작은 진동들이 발생합니다. 이런 진동 외력이 볼트와 너트에 미세한 영향을 주게 되어, 오랫동안 사용해 보면 볼트가 느슨해 진것을 알 수 있습니다.. 볼트가 느슨해 지면, 위의 무게 중심의 관계 때문에 한쪽이 처지게 되는데.. 이로 인해 4개의 V wheel 중에 몇 개가 공중에 떠 헛도는 현상을 발견하게 됩니다.
이 문제를 근본적으로 해결하기 위해서는 Z rod nut를 X축 프로파일의 무게 중심에 놓는 것이지만, Bed가 아래에 있기 때문에 Z rod 의 위치를 무게 중심 점으로 이동 시킬 수 없습니다.

Thingiverse 에 보면, Tevo Tarantula Mod 중에 Z축 구동모터를 아래쪽으로 내리고, X축의 가운데 달아 wobbling을 잡는 컨셉의 업그레이드가 있는데, 이것은 분석이 잘못 된 것 입니다. 가시적인 Center가 아니라, 무게 중심점에 위치시켜야 하는 것이죠... 물론 무게 중심점을 찾는 것은 쉽지 않습니다. ^^
또 다른 Mod로 Z축 모터를 위에서 바닥으로 내리는 invert Z 방식의 Mod가 있는데, 이 역시도 근본적인 해결 방법은 아닌 셈 입니다.
그럼 개선점은 없는 것일까 ?

위의 도식은 Tevo가 취하고 있는 기구 설계 컨셉을 단순화 한 것인데, 좌/우 파란벽에 각각 하나의 노란색 롤러가 고정되어 있다고 가정할때, 분홍색 축을 기준으로 왼쪽이 1kg의 무게가 짧은 오른쪽에 0.1kg의 무게가 실려 있다면, 극단적이기는 하지만, 아래와 같이 1kg쪽으로 기울어 지게 될 것입니다.

하지만, 롤러가 2개 3개 4개... 로 늘어 나면 늘어 날 수록, 버티는 능력이 높아지게 되겠죠...

아이디어는 좋기는 하지만, 또 다한 문제는 롤러를 지지하는 축에 있습니다. 아래의 그림은 벽을 밀고 있는 롤러를 측면에서 본 것인데요..

항상 A 와 같이 수직 상태를 이뤄야 하지만, 실제로는 B 처럼 기울어 지게 됩니다. 아무레도 볼트가 채결되는 Bracket 즉, 위의 도식에서 보면 녹색 부분이죠.. 이 부분이 아크릴 소재이고 4.5mm 로 얇기 때문에 롤러가 측면에서 받는 힘을 변형없이 지지해 주지 못하는 문제가 존재합니다.
결론적으로 Bracket 자체를 좀더 두껍게 하고, 롤러들 간의 거리가 변하지 않도록 구속 해 주는 방법을 써야 합니다.

위의 그림은 새로운 X축 브라켓 설계로, 보시면 프로파일에 4개의 wheel이 체결될 때, 4개의 v wheel을 잡아줄 Bracket을 하나 더 디자인 한 것을 보실 수 있습니다. 위와 같은 디자인을 반영하면, 4개의 wheel 의 축이 변형되기 어려울 뿐만 아니라, 일부 wheel의 축이 변형되더라도 Profile에서 완전히 이탈하여 헛도는 상황을 개선시킬 수 있습니다.

위의 사진은 업그래이드를 위해 X축 브라켓을 분해한 것으로 보시면, bracket 자체가 휘어 있는 것을 보실 수 있습니다. 프로파일을 미는 힘의 역 작영으로 변형이 된 것이죠.. 삼디몰 PLA를 썼지만 PLA가 연질인 이유도 있습니다.
이번에 업그레이드에 사용한 소재는 esun 사의 PLA+로 일반 PLA보다 강도가 높습니다.

위의 사진은 esun PLA+로 새로 출력한 bracket으로 두께를 6mm로 키웠으며, 보시는 바와 같이 v-wheel 유격을 제거하기 위한 guide를 확인하실 수 있습니다. Profile을 중심으로 앞 뒤 bracket의 위치를 일치시키기 위해 프로파일 끝에 딱 걸리도록 턱을 만든 것도 디자인 시 고려 했습니다.

X축 프로파일의 좌/우에 새로 출력한 브라켓을 조립한 상태 입니다.

위의 사진은 왼쪽 프로파일 바라켓 쪽으로 앞.뒤 브라켓을 장착한 모습니다.


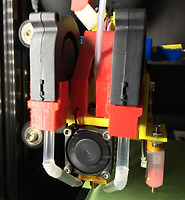
위의 사진은 좌/우 앞/뒤 총 4개의 브라켓을 모두 조립한 상태를 정면/후면에서 각각 찍은 사진 입니다. 빨간색은 Z Rod를 위한 Oldham Coupler의 상부인데, 이 부분은 뒤에서 살펴 보겠습니다.


위의 사진들은 좌/우 각각의 bracket에 V-wheel과 V-wheel 고정 bracket을 완전히 조립한 상태를 찍은 것 입니다. 튼튼해 보이죠 ? ^^
V-wheel 이 Profile의 Center에 오도록 앞/뒤로 6mm spacer를 넣은 것을 확인하실 수 있을 겁니다.
아, 한 가지 빠뜨렸는데요.. 보시면 V-wheel이 검정색 롤러가 아니죠.. 반투명 롤러인데.. 이번에 새로 업그레이드 하려고 Aliexpress에서 구매한 폴리카보네이트(PC) V-wheel Kit 입니다. 원래 포함되어 있던 검정색 V-wheel 보다 가벼우면서도 대단히 강한 재질로, 프로파일에 장착을 해 보면, 굴러가는 소리를 거의 들을 수 없습니다.

보시는 바와 같이 20개에 37달러 입니다. 고 품질의 625 2RS 베어링이 하나의 V-wheel의 좌/우 축에 두 개가 1쌍으로 체결되며, 나이론 너트와 십자 볼트 그리고, 알루미늄 6mm spacer와 고정 너트를 모두 20개씩 줍니다. 아주 괜찮습니다.
X축 브라켓 업그레이드는 이상 입니다. 다음 포스트에서는 wobbling문제를 해결하기 위한 Z축 브라켓 업그레이드를 살펴보도록 하겠습니다.
'3D 프린터 > tevo tarantula' 카테고리의 다른 글
| tevo tarantula 업그레이드 - part4 (MKS Gen 1.4 & TMC2100) (5) | 2017.09.13 |
|---|---|
| tevo tarantula 업그레이드 - part 3 (Y축) (0) | 2017.09.09 |
| vertical X carriage 완성. (0) | 2017.07.26 |
| tevo tarantula 조립 시 유의사항 - part 2 (7) | 2017.06.24 |
| tevo tarantula 조립 시 유의 사항 - part 1 (22) | 2017.06.18 |